BibTeX
@InProceedings{Berton_CVPR_2024_EarthLoc,
author = {Berton, Gabriele and Stoken, Alex and Caputo, Barbara and Masone, Carlo},
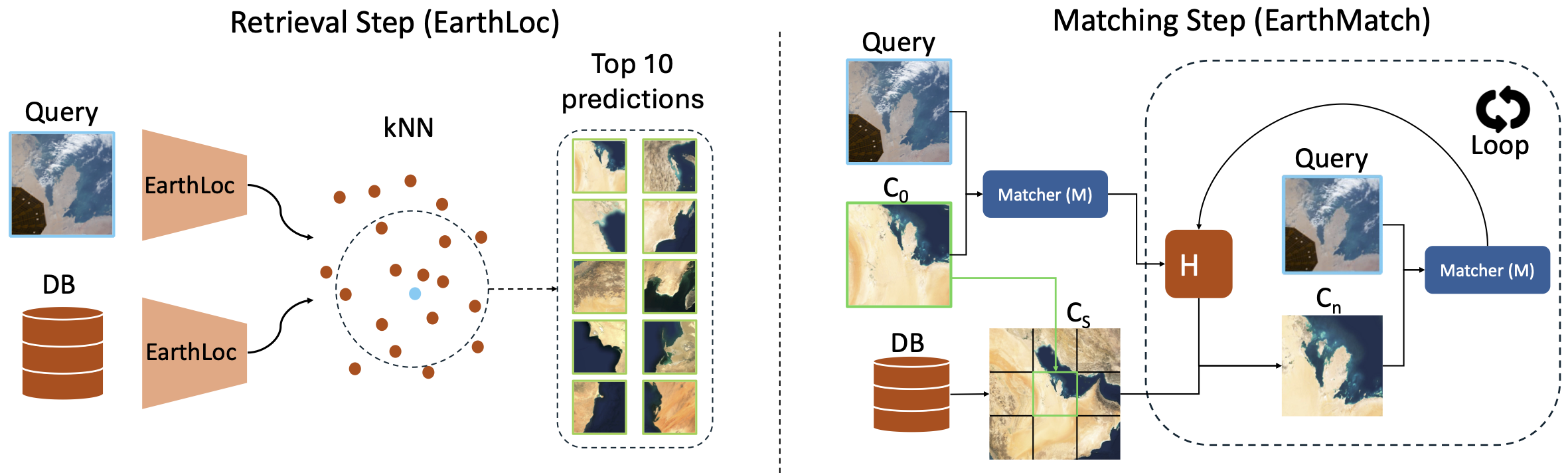
title = {EarthLoc: Astronaut Photography Localization by Indexing Earth from Space},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2024},
}
@InProceedings{Berton_2024_EarthMatch,
author = {Berton, Gabriele and Goletto, Gabriele and Trivigno, Gabriele and Stoken, Alex and Caputo, Barbara and Masone, Carlo},
title = {EarthMatch: Iterative Coregistration for Fine-grained Localization of Astronaut Photography},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops},
month = {June},
year = {2024},
}